
アメリカの火星探査機が打ち上げ
マーズ・グローバル・サーベイヤー (Mars Global Surveyor, MGS) は、アメリカ航空宇宙局 (NASA) ジェット推進研究所 (JPL) の無人火星探査計画、またはその火星探査機の名称である。
名前は「火星全球の測量者」の意味をもち、探査機はその名の通り極軌道上からの写真撮影や高度測定による火星の詳細な地図作成などを行い、惑星科学だけでなく後の探査計画にも関わる情報を提供した。
マーズ・グローバル・サーベイヤー(以下、サーベイヤー)は、同時期に打ち上げられ軟着陸を行ったマーズ・パスファインダーと対になって、アメリカが 20年ぶりに再開した火星探査計画の最初のものとなった。
サーベイヤーの初期ミッションは2001年1月に完了し、その後も延長ミッションを続けたが、3度目の延長ミッション中の2006年11月に通信を絶ったため翌年ミッションは終了した。
探査機と観測装置
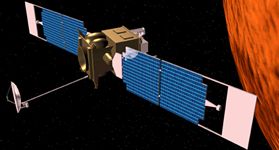
コロラド州デンバーにあるロッキード・マーティン・アストロノーティクス社 (Lockheed Martin Astronautics) で組み上げられたサーベイヤー探査機は、直方体型の胴体からそれぞれ反対側に向かった2つの翼のような太陽電池板がのびた形状をしていた。
打ち上げ時に燃料を満載した状態での探査機の質量は1060キログラムであった。
その質量の大部分をになう中心の直方体のモジュールは実際には互いに接した2つの直方体のモジュールからなっており、その一方の機器モジュール (equipment module) と呼ばれたものには探査機の電子機器、観測装置、コンピュータ (1750A(英語版)) が搭載されていた。
他方のモジュールは推進モジュール (propulsion module) と呼ばれ、サーベイヤーのロケット・エンジンや燃料タンクを抱えていた。
サーベイヤーには科学的観測のために5つの装置が搭載されていた。
MOC (Mars Orbiter Camera)火星表面を撮影する 3 種のカメラで、マリン・スペース・サイエンス・システムズ社 (MSSS) によって運用された。
MOLA (Mars Orbiter Laser Altimeter)赤外 (Nd:YAG) レーザーを火星表面に向けて発射し、反射光から表面高度を 0.3 m の精度で細かく精密に測定した。
TES (Thermal Emission Spectrometer)熱放射スペクトロメータ。赤外線の分光測定により大気や表面の組成を測定した。
MAG/ER (Magnetometer / Electron Reflectometer)磁力計。
USO/RS (Ultrastable Oscillator for Doppler measurements / Radio Science)ドップラー計測のための高安定発振装置。高精度の時計として探査機の通信と組み合わせることにより、探査機の微弱な速度変化を測定し重力異常の測定に用いられた。
この他、サーベイヤーは通信衛星としての役割りも担っていた。2004年に2機が火星表面に着陸しそれぞれ探査車(ローバー)を投入したマーズ・エクスプロレーション・ローバー (MER) は探査車と地球との通信のためにサーベイヤーを中継していた。
軌道投入までの道程
打上げを控えたマーズ・グローバル・サーベイヤー。 サーベイヤーはフロリダのケープカナベラル空軍基地から、デルタIIロケットによって1996年11月7日に打ち上げられた。
およそ7億5千万km、300日間の旅ののち、1997年9月11日に火星に到達した。到着時に主ロケットエンジンを22分間噴射して減速し、惑星間軌道から45時間周期の火星周回軌道へと投入された。
このときの軌道はまだ、「近火点」(periareion) すなわち火星に最も近い点で地表高度262km、「遠火点」(apoareion, 火星から最も遠い点) で54,026kmの非常に長い楕円軌道であった。
周回軌道投入後はエアロブレーキ (aerobraking) の技術を利用した軌道変更が試みられた。
サーベイヤーは一連の軌道変更を行い、近火点を徐々に下げて火星大気の影響を受けるおよそ高度110kmにまで達した。
この近火点通過時の微弱な大気の抵抗による減速によって、徐々に遠火点を下げ、軌道はより円に近いものへとゆっくりと近づけられた。
ゆっくりとしたエアロブレーキによる減速は装置に障害をもたらすほどのものではないと考えられ、またこれによって実質的に大量の燃料消費を行うことなく軌道の変更が成し遂げられる。
しかしサーベイヤーの2つの太陽電池板の片方がエアロブレーキによってわずかに傾いたため、サーベイヤーのフライト・チームは、10月11日にエアロブレーキを一時中断し、今度は大気の影響が弱くなる高度まで近火点を高める軌道変更のためのスラスター噴射(マヌーバ)を実行した。サーベイヤーの太陽電池板は1996年の打ち上げ後すぐにいくらか損傷を受けていた疑いがもたれていた。
元々の計画よりもゆっくりとしたペースでエアロブレーキが行われるならば問題ないとフライト・チームが結論を下した11月7日に再びエアロブレーキによる軌道変更が再開された。
新しい計画では、エアロブレーキは元の計画よりも 10 km 高い近火点120kmの平均高度で行われ、これは探査機が受ける大気の抵抗の66%の減少をもたらした。この6ヶ月の間、エアロブレーキによって軌道周期は12時間から6時間へと減少された。
1998年の5月から11月にかけてエアロブレーキは再び中断された。これはエアロブレーキによる軌道変更が完了したときに、サーベイヤーが不適切な太陽との位置関係となってしまうことを防ぐためのものであった。
ミッションの効率を最大限のものとするために、この6ヶ月の間は日に2〜4回訪れる近火点付近で可能な限りの科学的データの収集が行われた。
1998年11月からエアロブレーキは再開され、最終的に遠火点の高度は450kmにまで縮められた。この高度の軌道においてはサーベイヤーはおよそ2時間で火星を一周する。地図の作成をミッションとするサーベイヤーは、火星の局地時間で午後2時にあたる地点で赤道を南から北へ常に通過することが望まれていた。
この位置関係は全体的な科学的成果を高めるために選択されたもので、1999年3月、こうした太陽の方向と望ましい位置関係になったと同時にエアロブレーキのミッションは終了された。
火星観測と地図の作成
MOLA データから構成された火星の地表高度。(NASA/JPL) 最終的にサーベイヤーは平均高度378kmの117.65分の公転周期をもつほぼ真円の軌道をもつに至った。
軌道は極軌道に近く(軌道傾角 93°)、よってほぼ1時間で火星の南極上空から北極上空に到達する。
この周期をもつ高度は、探査機から撮影される同じ地点の画像が、異なる日であっても常に同一の光の状態となるよう太陽の向きと同期するように選択されたものであった。
サーベイヤーは各軌道周回ごとにその下で自転する火星の28°.62ずつ西の地点を通過した。
地球の時間で 24時間39分35秒の火星の自転周期はソル (sol) とよばれ、サーベイヤーのこの公転周期は88周でほぼ正確に7ソルとなる。
すなわち火星の時間で7日ごとに探査機はほぼ同じ経路をたどった。
実際には59kmだけ東へのずれがあるので、これにより最終的に(極地のごく一部を除く)火星全体を探査機がカバーできることを保証していた。赤道での59kmはほぼ経度の1°に相当する。
搭載されたカメラ MOC は、主として探査機直下の25万枚にのぼる画像を収集した。
直下の画像を得るためにローリングとピッチングの装置が用いられた。
これらの装置は探査機と火星表面との相対的な動きを補正し、最も高解像度のカメラでは地上0.5mの解像度の写真を撮影できた。
延長ミッションでは直下以外の画像の撮影も行われた。
レーザー照射と反射波の測定による表面高度測定装置MOLAは、ほぼ全球の地形データを獲得し、これによって詳細な火星の数値標高モデル MEGDR が作成・公開された。
これは火星の過去にあったであろう水の流れなどを同定する調査にも用いられた。
また極冠の厚さなどの地形の季節変化の測定にも成功した。レーザーの照射装置そのものは2001年6月に寿命をむかえたが、測定装置はその後も地表の観測を続けた。
このほか赤外線スペクトロメータ TES は惑星の気候の測定をはじめ、ヘマタイトの集積などの測定を行い、これにより太古の火星に大量の水とより厚い大気があったことを示唆する新しい証拠が見出された。
さらに磁力計 MAG/ER によって火星の弱い磁場が惑星の核がもたらすような一様なものではなく局所的に偏って分布していることを明らかにした。
探査機が交信を絶った後の2006年12月になって MSSS はクレーター内壁の浸食痕 (gully) の膨大な調査の末に、火星南半球のシレーン陸地とケンタウリ台地にあるクレータの内壁の写真を公表し、ごく最近に新たに堆積物の現れた浸食痕があることを示した。
サーベイヤーによってそれぞれ4年と6年の間隔を開けて撮影されたこれら2組の同じ場所の写真には、それぞれの新しいものの方に明るい筋状の堆積物があり、これはこの期間のどこかで水と思われる流体が吹き出し流れた後だと示唆された。
通信の途絶
2006年11月2日に、管制センターはサーベイヤーとの交信を突如失ってしまった。
辛うじて3日後に微弱な信号が捉えられたが、それは探査機が「セーフ・モード」に入り地球からの次の指令を待っている状態にあること告げていた。
その5ヶ月ほど前から新たに火星周回軌道に投入されていたマーズ・リコネッサンス・オービター (MRO) が11月20日にサーベイヤーの姿勢を調べるために、その写真撮影を試みたが失敗に終わった。その後の復旧の試みもすべて不調に終わり、NASAは2007年1月に公式にミッションを終了した。
NASAは同月、2006年6月に行われた探査機のシステムのパラメータ・アップデートの誤りが、この失敗の原因になったのかもしれないと発表した。
このアップデートにおいて、太陽電池を調整する指令の中の2つのメモリ・アドレスに誤りが発見されていた。この誤りがもたらすであろう帰結として、太陽電池板が急停止するまで駆動され、その後セーフ・モードに入ることがあった。
パラメータの誤りの別の帰結は、探査機がジンバル・モータの誤りを間違って診断付けたであろうことであった。
サーベイヤーの航行ソフトウェアに組み込まれた特殊なアルゴリズムでは、このときこれは太陽電池板が太陽の方向を向いて固まることになることを意味し、さらにこの配置では電池を冷却せねばならない放熱板も太陽を向くことになり、これは電池の加熱と損傷をまねくと考えられた。
2007年4月には、NASA は探査機に最もありえたと思われることは、搭載コンピュータと地上指令が関係する複雑な事象の過程による電池の損傷であるとの報告を発表した。
探査機は火星の1年、地球でのおよそ2年の間観測を続ける予定であったが、NASA は3度のミッションの延長を行い科学的データを収集した。
経過
1996年11月7日: ケープカナベラル空軍基地より、デルタIIロケットで打ち上げ。
1997年9月12日: 火星の南北を通る極軌道に乗る。
1998年: 太陽電池パネルの片一方が機能不全になる。そのため1年間作業延期。
1999年3月: 第1次マッピングミッションを開始。
2000年1月31日: 第1次マッピングミッションが終了。火星の高精度地形図が完成した。
2003年末: 第2次マッピングミッション終了。
2006年9月まで: 第3次マッピングミッション中。
2006年11月21日、NASAは探査機と通信が途絶したため、9年に及ぶ観測が終了の見通しであると発表した。
2007年4月13日:NASAは人為的ミスにより太陽電池パネルが故障し活動を継続出来なくなったと暫定的な調査結果を明らかにした。
抜粋:http://ul.lc/55as(wikipedia)より

